
Case Study
Autoportrait
Drawn to Life: Engineering a Robotic Portrait Experience
An interactive art exhibition brought to life in collaboration with Tellart and Visionaire, sponsored by Cadillac
The Client
Tellart is an award-winning design studio that blends storytelling, emerging technology, and immersive environments to craft unforgettable experiences. With roots in industrial design and a deep fluency in digital interaction, Tellart is known for creating multisensory exhibitions, installations, and prototypes that explore the future of human experience. Their work bridges the conceptual and the tangible, transforming abstract ideas into meaningful physical encounters.
Visionaire is a trailblazing creative studio and cultural curator known for producing provocative, genre-defying experiences at the intersection of art, fashion, and design. With a legacy of collaboration with leading brands, artists, and institutions, Visionaire pushes the boundaries of what an exhibition or publication can be. Their work is both visually striking and deeply conceptual, designed to spark dialogue, emotion, and wonder.
The Challenge
Create an interactive art experience that seamlessly blends technology and creativity—demonstrating that art and engineering are not at odds, but deeply complementary. The installation needed to engage the public in a personal, expressive way while showcasing the precision and potential of robotic systems. It wasn’t just about spectacle—it was about designing a moment where human expression and machine intelligence intersected, face-to-face.


The Approach
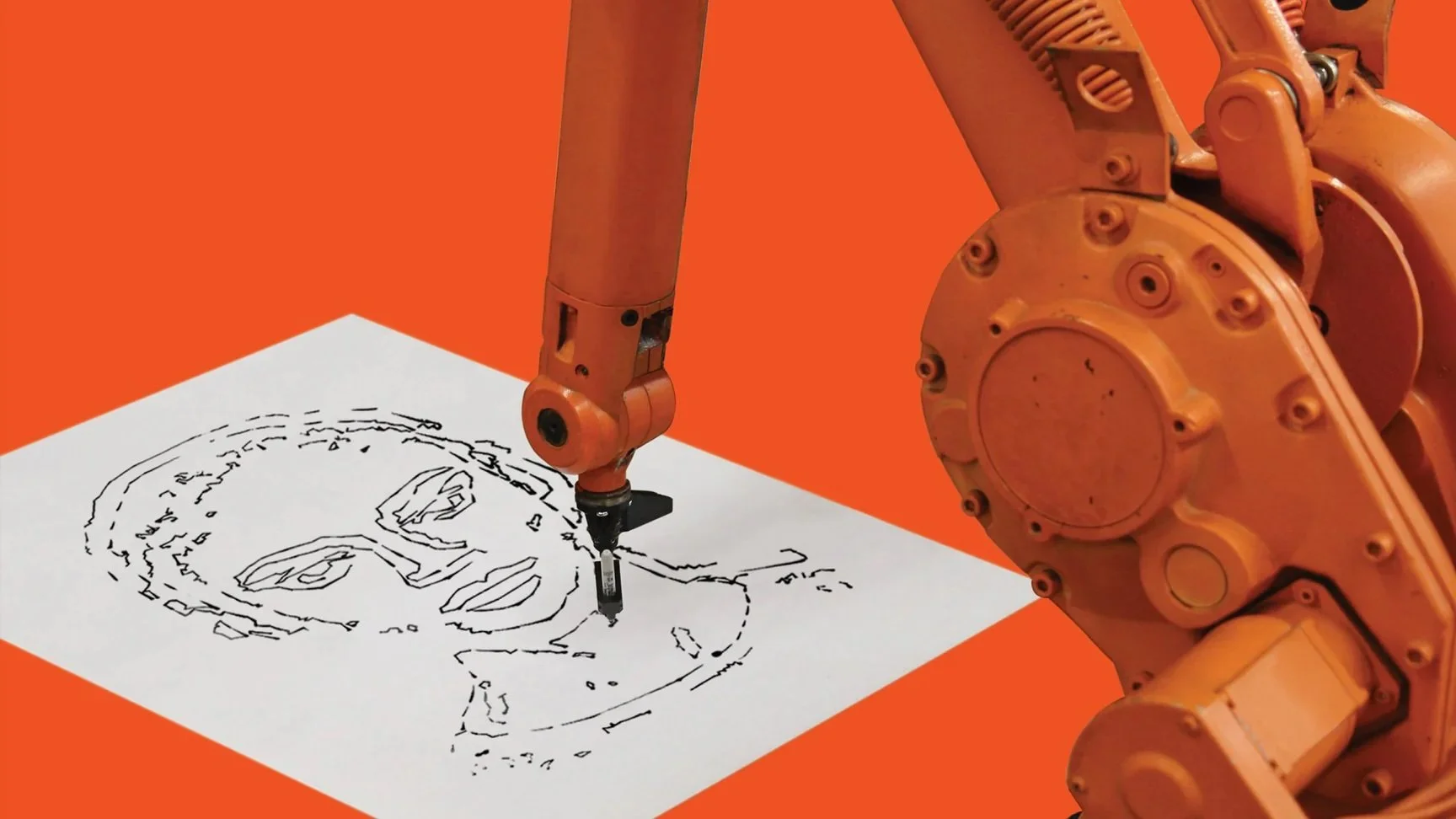
LeafLabs had the pleasure of working with Tellart and Visionaire (sponsored by Cadillac) to create the interactive art exhibition, Autoportrait, which featured an assembly robot, ADA0002, drawing portraits of gallery patrons.
Before ADA0002 was employed as an automated portraitist, its existence was decidedly less colorful as an arc welding robot, until rescued from a factory in Wisconsin. ADA0002’s hardware is a 6-axis industrial robot, the ABB IRB 1440. The tools created for programming robots of this size and power are tailored to assist in developing highly repetitive, very precise, and carefully constrained assembly line workflows. With this in mind, it is no easy task for a designer to make the robot implement small, quick, organic variations, for the high-level goal of looking at a person and drawing that person’s face.
Unlike the previous robots the clients had built, the ABB IRB 1440 presented a fairly limited real-time IO interface. The S4C+ controller that the robot is designed to work with can only accept programs that describe complete tasks, and it can’t help the robot modify its behavior in real-time based on data like the subject’s facial shape, the portrait paper positioning on the table, etc. This made the task of interfacing the robot’s web camera eyepiece, with the rest of its hardware, more challenging. It also made the task of enabling the robot to present organic and personality-rich behaviors, during its acts of creation, particularly nuanced.
All images courtesy of Visionaire and Tellart
Capabilities & Tools
Generation of and transpilation between hardware control languages
GCode and ABB RAPID
Python
OpenCV
ABB RobotStudio
Selected Press

Let’s blur the line between technology & emotion
We bring the technical precision and creative curiosity to make it real.
Trusted By:




